Social Digital Cyborgs: The Collaborative Design Process of JIZAI ARMS
Year
2023
Abstract
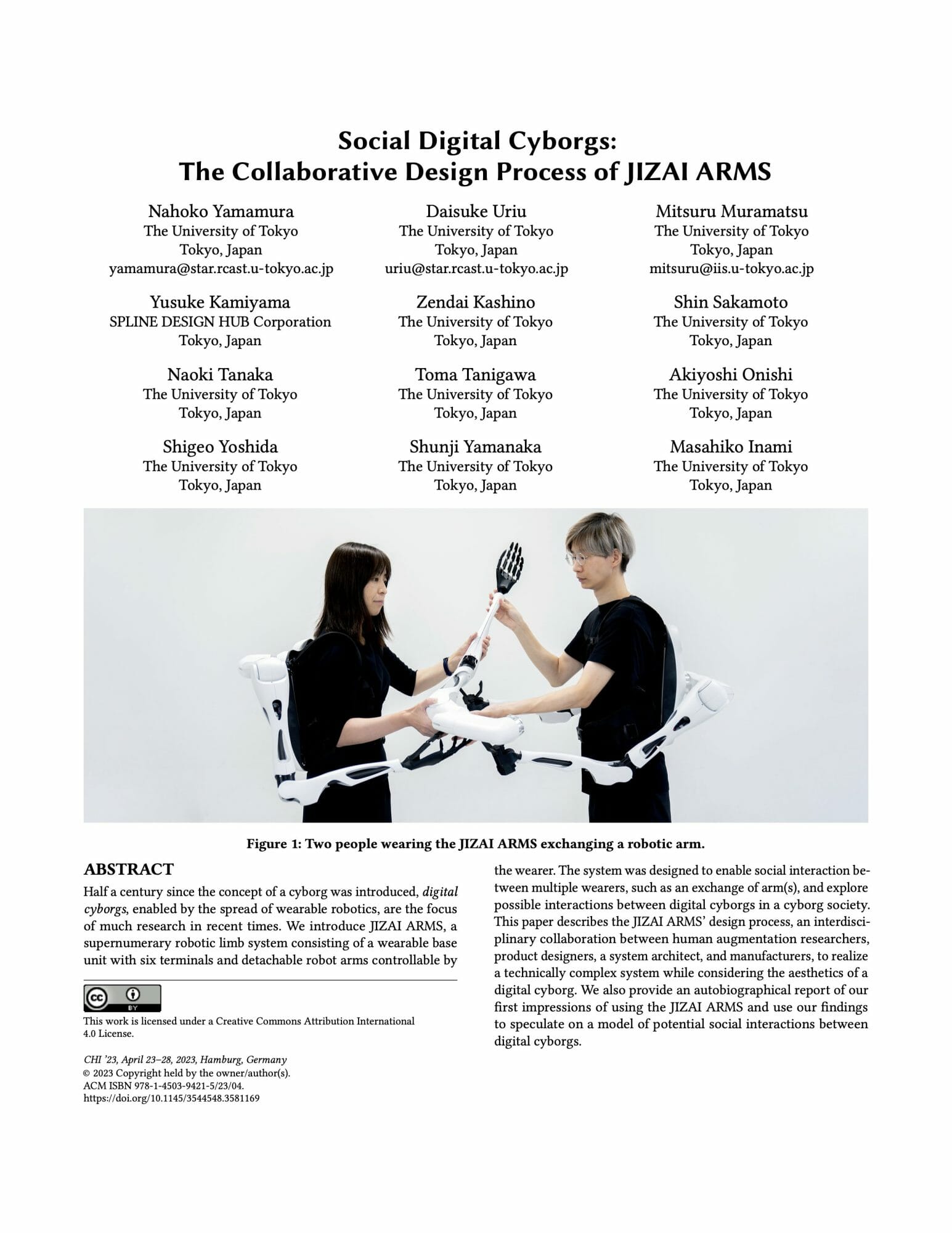
Half a century since the concept of a cyborg was introduced, digital cyborgs, enabled by the spread of wearable robotics, are the focus of much research in recent times. We introduce JIZAI ARMS, a supernumerary robotic limb system consisting of a wearable base unit with six terminals and detachable robot arms controllable by the wearer. The system was designed to enable social interaction be- tween multiple wearers, such as an exchange of arm(s), and explore possible interactions between digital cyborgs in a cyborg society. This paper describes the JIZAI ARMS’ design process, an interdisciplinary collaboration between human augmentation researchers, product designers, a system architect, and manufacturers, to realize a technically complex system while considering the aesthetics of a digital cyborg. We also provide an autobiographical report of our first impressions of using the JIZAI ARMS and use our findings to speculate on a model of potential social interactions between digital cyborgs.



